EL ORBITADOR DE RECONOCIMIENTO DE MARTE - MRO
 El Mars Reconnaissance Orbiter - MROt llegó a Marte el 10 de Marzo de este año (2006), luego de viajar casi 7 meses por el espacio, acercándose desde el hemisferio sur del planeta. Para que la nave, del tamaño de un bus, pudiera ser capturada por la gravedad de Marte, hubo de realizar una maniobra de frenado, la llamada Inserción en la Órbita de Marte, donde la nave activó sus cohetes de frenado para disminuir su velocidad relativa al planeta y ser capturado en una amplia órbita elíptica.
El Mars Reconnaissance Orbiter - MROt llegó a Marte el 10 de Marzo de este año (2006), luego de viajar casi 7 meses por el espacio, acercándose desde el hemisferio sur del planeta. Para que la nave, del tamaño de un bus, pudiera ser capturada por la gravedad de Marte, hubo de realizar una maniobra de frenado, la llamada Inserción en la Órbita de Marte, donde la nave activó sus cohetes de frenado para disminuir su velocidad relativa al planeta y ser capturado en una amplia órbita elíptica.
Esto ocurrió cuando el MRO pasaba a 300 km de altura sobre la superficie marciana, viajando a una velocidad de unos 10 800 kilómetros por hora (6,500 millas por hora) respecto al planeta. Para ser capturado debió bajar su velocidad a 3 541 kilómetros por hora (2,200 millas por hora) activando los 6 motores de 170 Newton de su motor cohete principal durante 27 minutos.
La nave entró así en una órbita elíptica, con un periares (periapsis) de 300 kilómetros de altura y un apoares (apoapsis) de 45 000 kilómetros, donde a la nave le tomaba 35 horas en una vuelta completa de su órbita de su órbita de captura.
Vino luego un largo proceso de correcciones de esta órbita, entre comienzos de Abril y el 30 de Agosto, 2006, de 426 órbitas, para llegara a la de trabajo, utilizando como principal sistema de frenado el aerofrenado, que consiste en el uso de las capas exteriores de la atmósfera del planeta para bajar su velocidad. Para ello la nave fue lentamente sumergida en la sutil atmósfera de Marte, a alturas de hasta 91 metros sobre la superficie.
La MRO llegó finalmente a su órbita de trabajo el 11 de Septiembre 2006, luego de disparar sus seis retrocohetes por 12 minutos y 30 segundos, alcanzando una órbita casi circular a baja altura, 250 kilómetros a 316 kilómetros, que le permitirá comenzar a escudriñar el planeta con sus cámaras y radares.
Posteriormente, los operadores ordenaron el despliege de su poderosa antena de 10 metros y destaparon los instrumentos. La nave entró en un período de pruebas y debe comenzar a cumplir sus objetivos científicos en Noviembre, 2006. Se espera que durante sus dos años de operaciones, permita obtener más información de Marte que todas las misiones enviadas a Marte con anterioridad combinadas.
Las maniobras de aerofrenado permiten ahorrar peso en la nave, permitiendo que ésta lleve más instrumentos, para realizar las maniobras de recorte de la altura utilizando sólo motores cohetes, la nave misión habría necesitado unos 600 kilos de combustible.
La nave, además de sus instrumentos científicos, lleva potentes equipos de comunicaciones y servirá como un satélite de enlace de misiones futuras a Marte. La primera en utilizar estas capacidades, de acuerdo a la NASA será la misión Fénix, del programa Mars Scout. El Fenix sera una estación fija que se posará en la región polar del casquete norte de Marte en el 2008. Los datos que entregue el MRO servirán para seleccionar los lugares de descenso de futuras misiones, el primero que hará uso de éstos datos será el sofisticado robot móvil llamado Laboratorio Científico de Marte, actualmente en desarrollo y que debe comenzar sus operaciones en el Planeta Rojo en el año 2010.
Con sus instrumentos podrá examinar la superficie del planeta en varias frecuencias del espectro electromagnético, desde el UV a las ondas de radio.
Instrumentos:
High Resolution Imaging Science Experiment, fotografiará un 1 por ciento de su superficie con una resolución de 1 metro.
Compact Reconnaissance Imaging Spectrometer, buscará minerales relacionados con la presencia de agua.
Cámera de Contexto, para tomas de campos ámplios, sus imágenes abarcarán el 15 por ciento del planeta.
Mars Climate Sounder, estudiará la atmósfera marciana analizando las variaciones del vapor de agua, el polvo y la temperatura.
Mars Color Imager: producirá imágenes globales diarias para seguir los cambios en el clima marciano. Sus filtros ultravioletas servirán para estudiar las variaciones en la débil capa de ozono existente en la atmósfera de Marte.
Shallow Subsurface Radar, capaz de penetrar con sus ondas hasta medio kilómetro bajo la superficie de Marte, en busca de información sobre posibles capas de agua o hielo bajo el suelo de Marte.
Un séptimo instrumento, la Cámara de Navegación Óptica, le sirvió a la nave durante su llegada, al observar las posiciones de sus satélites Fobos y Deimos, y compararlos con las posiciones predichas, de modo de poder corregir la órbita, aunque sus datos no se usaron en la MRO, el novedoso método puede ser usado en futuras expediciones para afinar el posicionamiento durante el crítico momento de la llegada al planeta.
La nave Mars Reconnaissance Orbiter tiene una altura de 6,5 metros tocado por su gran antena de radio, la envergadura de sus paneles solares es de 13,6 metros, con 20 metros 2 de células solares. La nave pesó unos 2 180 kilos en el lanzamiento, donde el combustible para los 20 motores cohetes de la nave ocupaban cerca de la mitad de esta masa.
Mars Reconnaissance Orbiter:
NUEVA CÁMARA EN ÓRBITA DE MARTE
Comienzan a llegar las imágenes de la nueva Cámara desde la órbita de Marte.
(2 Octubre, 2006 JPL / NASA / CA) La cámara de alta resolución del Mars Reconnaissance Orbiter de la NASA, ha enviado la primera imagen de Marte tomada desde su órbita de cartografía, mostrando su capacidad el 29 de Sept. 2006. Se trata de la Cámara High Resolution Imaging Science Experiment (HiRISE), con la nave a una altura de 280 kilómetros (174 millas), la escala es de 29,7 centímetros per pixel y se pueden ver objetos de 90 centímetros, con lo que se podría ver a una persona sentada en el suelo del valle.
Imagen: Primera imagen de la cámara de alta resolución del Mars Reconnaissance Orbiter
La imagen muestra una pequeña porción del Ius Chasma, una rama del gigantesco sistema de cañones Valles Marineris system. Se pueden apreciar los procesos que han afectado la superficie marciana. En la imagen el norte está arriba.
Robot Opportunity:
LLEGA AL CRÁTER VICTORIA
Sus operadores del Jet Propultion Laboratory de la NASA, planean hacerlo bajar al interior para explorarlo.

(2 Octubre, 2006 NASA / El País / CA) Luego de haber recorrido 26 metros en una jornada, el robot Opportunity de la NASA, la llegado al borde del cráter Victoria asomándose en su interior. Se trata de un gran cráter de impacto de unos 750 metros de diámetro y 70 metros de profundidad. Las primeras imágenes enviadas permiten ver que el centro del cráter es un arenal con ondulaciones modeladas por el viento marciano y el borde opuesto es una cresta irregular que deja al descubierto en algunas zonas rocas y sedimentos.
El Opportunity llegó al borde del Victoria, ubicado en la región de Meridiani Planum, el 26 de septiembre, el día marciano (sol) número 951 desde su descenso en el planeta rojo. Los planes son analizar las primeras fotografías recibidas y diseñar una estrategia de exploración. Entonces empezarán a enviar las órdenes pertinentes al robot para hacerle descender al cráter, aunque salir de él luego podría ser difícil.
Además de cámaras, el Opportunity lleva varios instrumentos, como el espectrómetro que analiza minerales.
Imagen: El cráter Victoria, en una imagen compuesta de una combinación de tres imágenes. Este cráter ha sido uno de los objetivos de los operadores de la misión en los últimos 21 meses terrestres.
Los operadores están acercando cuidadosamente el robot al borde del cráter Victoria, que es unas cinco veces mayor que el Cráter Endurance, que el robot exploró durante seis meses el 2004, y 40 veces mayor que el "Cráter Águila", el lugar donde el Opportunity tocó suelo marciano.
"Es el sueño de un geólogo hecho realidad", ha comentado Steve Squyres, científico de la Universidad de Cornell e investigador principal de la misión de los vehículos automáticos Opportunity y su gemelo Spirit. "Si logramos llegar a esas capas de rocas, nos contarán nuevas historias acerca de las condiciones medioambientales de hace mucho tiempo. Especialmente queremos saber si la era húmeda, cuyo registro encontramos en las rocas cercanas a la zona donde descendió el robot, se prolonga en el tiempo."
El Opportunity llegó a Marte en enero de 2004 y ha recorrido ya 9,2 kilómetros allí; su gemelo el robot Spirit, llegó un poco antes a otra zona del planeta y ha cubierto 6,8 kilómetros. Estaba previsto que estos dos robots de la NASA, diseñados y construidos en el Jet Propulsion Laboratory (JPL), en California, funcionasen tres meses, pero siguen operativos casi tres años después.
El Spirit, está estacionado al otro lado de Marte, al sur del ecuador marciano, estudiando el clima de Marte, especialmente el efecto del polvo y el viento, en una posición que le permite mantener sus baterías cargadas. Comenzará a moverse nuevamente cuando la primavera marciana permita aumentar la cantidad de luz solar que reciben sus paneles solares y que generan la energía para sus baterías.
Las operaciones de ambos robots se minimizarán durante Octubre, ya que Marte quedará detrás del Sol desde la perpectiva terrestre, haciendo más difíciles las comunicaciones con la Tierra.
Robot Opportunity:
SE ACERCA A UN GRAN POZO MARCIANO
El vehículo a control remoto llegará en pocos días al borde del cráter Victoria.

(7 Septiembre, 2006 NASA CA) El robot explorador de la NASA Opportunity se acerca a la que podría llegar a ser su mayor mirada y su más rico aporte científico de su larga misión.
En algún momento de las próximas dos semanas, el geólogo robótico debe alcanzar el borde de un agujero excavado en la superficie de Marte, más ancho y profundo que ninguno de los que ha visitado. Se trata del crater "Victoria," que tiene unos 750 metros (media milla) de ancho y 70 metros (230 pies) de profundidad.
Arriba: Esta fotografía, tomada por el satélite de observación Mars Global Surveyor, de la NASA, muestra que las murallas del cráter tienen capas de rocas de unos 30 a 40 metros de profundidad. El Opportunity enviará sus primeras imágenes del cráter tan pronto como se asome al borde del acantilado. La barra blanca indica el equivalente a 400 metros. Crédito MGS/NASA
En estos momentos, los científicos que operan el robot desde la Tierra, utilizan una combinación de imágenes tomadas por el Mars Global Surveyor y por el mismo robot explorador para determinar la mejor ruta por la que pueden conducir al Opportunity en su entrada al cráter.
El "Victoria ha sido nuestro destino por más de la mitad de la misión", dijo Ray Arvidson de la Washington University, St. Louis. Arvidson es el delegado del investigador principal del Opportunity y su robot mellizo Spirit. "El examen de las rocas expuestas en las murallas del crater aumentará nuestra comprensión de las condiciones del pasado de Marte y del rol del agua. Queremos saber si estas rocas tienen evidencias de haberse formado en lagos de baja profundidad".
Los rovers de la NASA han estado explorando paisajes en lados opuestos de Marte, desde Enero del 2004. Su misión principal duró tres meses. Ambos aparatos todavía se encuentran operativos y han sido usados por los geólogos planetarios de la NASA que los operan desde Pasadena, California para continuar estudiando las rocas, suelo y atmósfera de Marte por más de 30 meses. El Opportunity trabaja en una región donde capas de cientos de metros de grosor cubren terrenos más antiguos cubiertos de cráteres de impactos.
"Tenemos un vehículo completamente functional con todos sus instrumentos trabajando. Estamos listos para abordat el Victoria con todo lo que tenemos", dijo Byron Jones, el administrador del Laboratorio de Propulsión a Chorro de la NASA, en Pasadena, California.
A pesar que todavía es invierno en el hemisferio sur de Marte, los días, al igual que en la Tierra, han comenzado a alargarse nuevamente y la potencia de las baterías solares del Opportunity aumenta diariamente.
Apenas alcanzamos a ver a Marte en estos días, y ya el movimiento de la Tierra hará que el Sol se interponga entre los planetas, po lo que dejaremos de verlo y de recibir sus señales durante un par de semanas. Pasados los cuales comenzará una nueva aparición de Marte, al amanecer.
ESTOS SON LOS ROBOTS EXPLORADORES DE LA NASA.
ROBOT SPIRIT SUBE CERROS COLUMBIA EN MARTE

(17 Agosto, 2005 NASA - CA) A su llegada a Marte, Spirit fotografió un conjunto de cerros cercanos al lugar de descenso, que fueron bautizadas por lo científicos que lo operan desde el JPL de Pasadena, California, como
Cerros Columbia, con los nombres de los tripulantes muertos en el trasbordador Columbia. En estos días y luego de 577 soles (días marcianos) de trabajo en Marte, el robot Spirit continúa el ascenso hacia estas alturas y está muy cerca de su cumbre.
Ayer terminó sus investigaciones realizadas con su brazo robótico de la roca "Assemblee", encontrada en el camino. En el sector "Gruyere" tomó imágenes con el microscopio y la analizó con los espectrómetros de Moessbauer y de rayos X.
Sus imágenes panorámicas y películas de remolinos de polvo moviéndose por el desierto marciano son las mejores tomadas hasta elk momento.
Su herramienta de abrasión se ha gastado por exceso de uso, lo que es normal ya que el robot Spirit ha sobrepasado largamente su vida útil, programada inicialmente en 90 soles.
Imagen: Los mejores remolinos de polvo filmados en Marte. Crédito: Spirit (MER-A) NASA. Sol 568. Haga click aquí para ver una insólita película de varios remolinos de polvo moviéndose por el desierto marciano.
Vea el recorrido del robot Spirit en Marte, haciendo click aquí.





 (27 Nov. 2006 NASA/CA)
La NASA ha informado que ha renunciado a restablecer el perdido contacto con uno de sus satélites en órbita de Marte dando por terminada su misión, se trata del Mars Global Surveyor (MGS) una nave de observación que ya ha entregado una extraordinaria cosecha de información sobre el Planeta Rojo.
(27 Nov. 2006 NASA/CA)
La NASA ha informado que ha renunciado a restablecer el perdido contacto con uno de sus satélites en órbita de Marte dando por terminada su misión, se trata del Mars Global Surveyor (MGS) una nave de observación que ya ha entregado una extraordinaria cosecha de información sobre el Planeta Rojo.


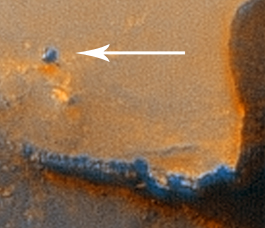 Imagen izquierda: Detalle de la imagen de arriba, tomada desde unos 300 kilómetros de altura por la cámara "High Resolution Imaging Science Experiment" (Experimento de Imágenes Científicas de Alta Resolución) del Mars Reconnaissance Orbiter. NASA.
Imagen izquierda: Detalle de la imagen de arriba, tomada desde unos 300 kilómetros de altura por la cámara "High Resolution Imaging Science Experiment" (Experimento de Imágenes Científicas de Alta Resolución) del Mars Reconnaissance Orbiter. NASA.

 (20 Mayo, 2005 NASA/Universe Today/CA) La nave Mars Global Surveyor de la NASA ha vuelto su mirada hacia otra nave explloradora en la órbita marciana: la Mars Odyssey de la misma agencia, tomandole la primera imagen de una nave espacial tomada por otra en un planeta fuera del nuestro. Estaban separadas por sólo 90 kilómetros al momento de la toma. Ambas naves tienen una órbita circular a unos 400 kilómetros de altura, con una diferencia de algunas decenas de kilómetros entre ellas para evitar una colisión. Pueden llegar a estar a 15 kilómetros de distancia.
(20 Mayo, 2005 NASA/Universe Today/CA) La nave Mars Global Surveyor de la NASA ha vuelto su mirada hacia otra nave explloradora en la órbita marciana: la Mars Odyssey de la misma agencia, tomandole la primera imagen de una nave espacial tomada por otra en un planeta fuera del nuestro. Estaban separadas por sólo 90 kilómetros al momento de la toma. Ambas naves tienen una órbita circular a unos 400 kilómetros de altura, con una diferencia de algunas decenas de kilómetros entre ellas para evitar una colisión. Pueden llegar a estar a 15 kilómetros de distancia.